At Seeed Studio, we’re diving into the latest open-source robotics projects, focusing on Physical AI to bring more engaging hackathons worldwide. Here, you’ll gain hands-on experience in hardware assembly, data collection, NVIDIA Isaac Sim, model training, and edge deployment for real-time processing and inference. Starting with the Hugging Face LeRobotplatform, we’ve worked alongside developers throughout the journey, sharing ideas and building connections along the way.
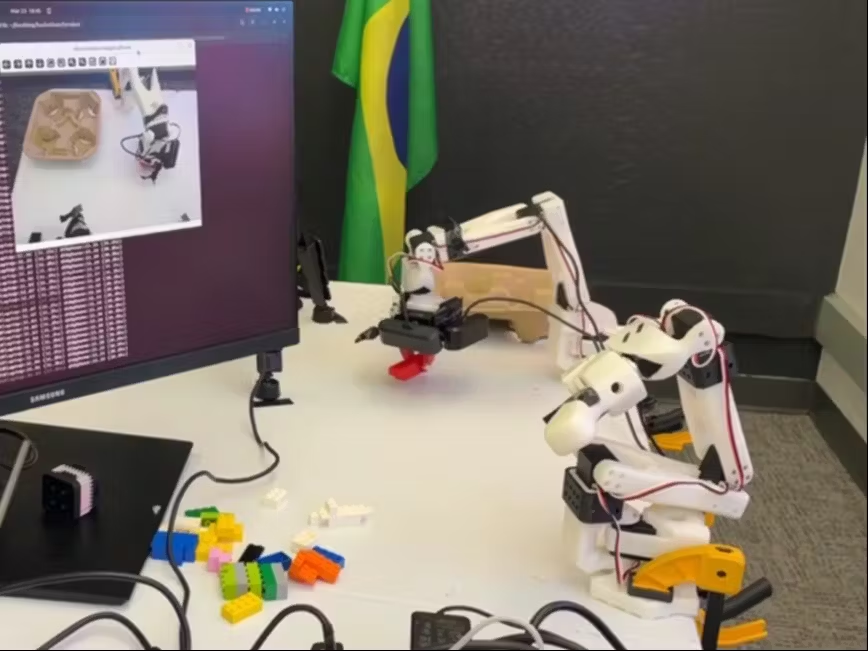
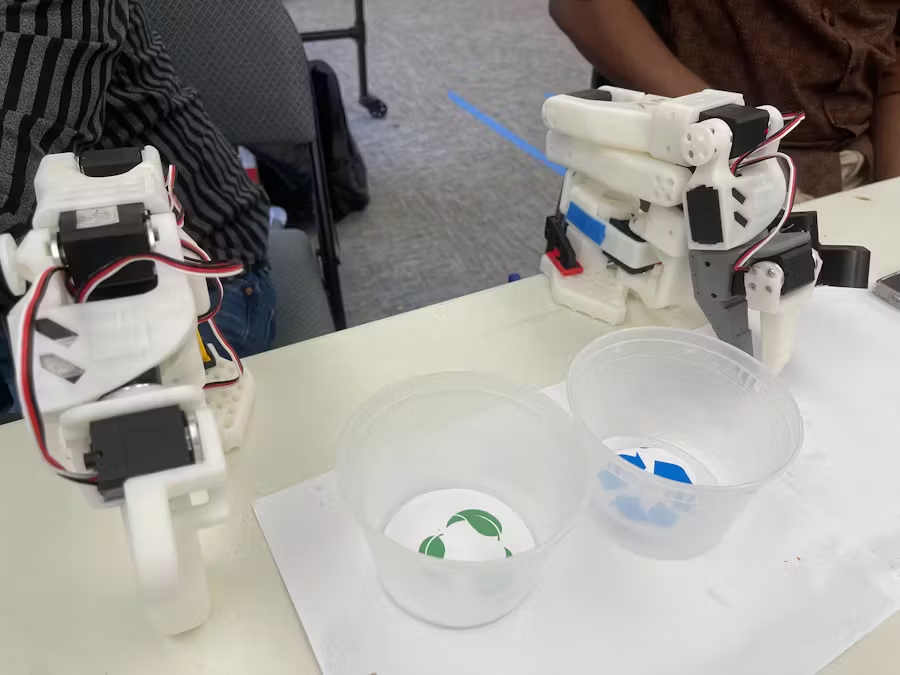
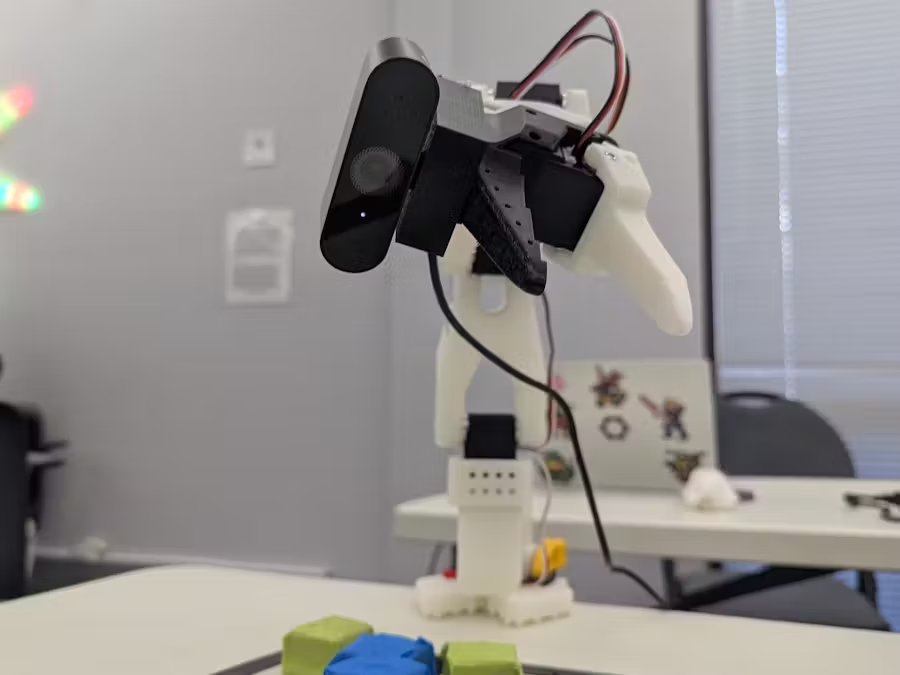
Here’re all winning projects collected on Hackster, where each group complete their project with SO-ARM100 robot arm kit to complete imitation learning tasks, training strategies including ACT/Diffusion Policy/Pi0/GR00T N1 and deploying on NVIDIA Jetson at the edge for real-time inferencing.
Contact edgeai@seeed.cc to become our rangers! Be the first to get hands-on experience about new AI hardwares, connect with tech experts from NVIDIA, Hugging Face,etc, and host our hackathons at your local community/workspace!