ARMOR: Egocentric Perception for Humanoid Robot Powered by XIAO ESP32S3
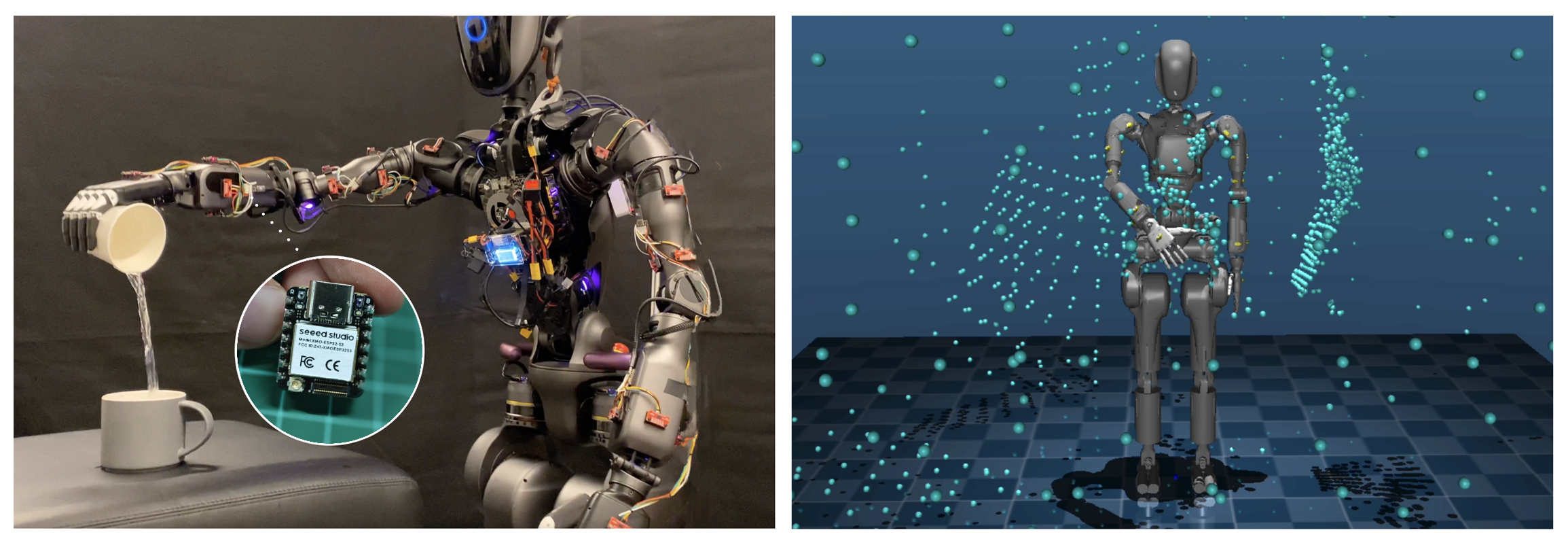
“We might imagine a future where users easily plug and play with wearable sensors for humanoids and augment robots' perceptions in various tasks. XIAO ESP32 series makes the wearable sensor system easily modularizable. We specifically adopted the XIAO ESP32S3 in ARMOR because of its powerful computing and tiny form factor.”

Hey community, we’re curating a monthly newsletter centering around the beloved Seeed Studio XIAO. If you want to stay up-to-date with:
 ️ Cool Projects from the Community to get inspiration and tutorials
️ Cool Projects from the Community to get inspiration and tutorials Product Updates: firmware update, new product spoiler
Product Updates: firmware update, new product spoiler Wiki Updates: new wikis + wiki contribution
Wiki Updates: new wikis + wiki contribution News: events, contests, and other community stuff
News: events, contests, and other community stuff
Please click the image below to subscribe now!
to subscribe now!
