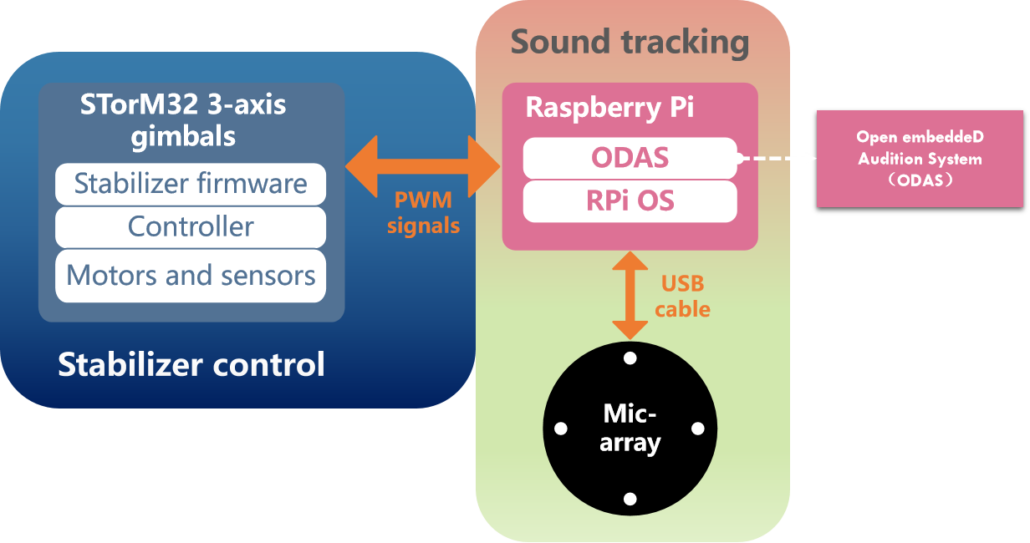
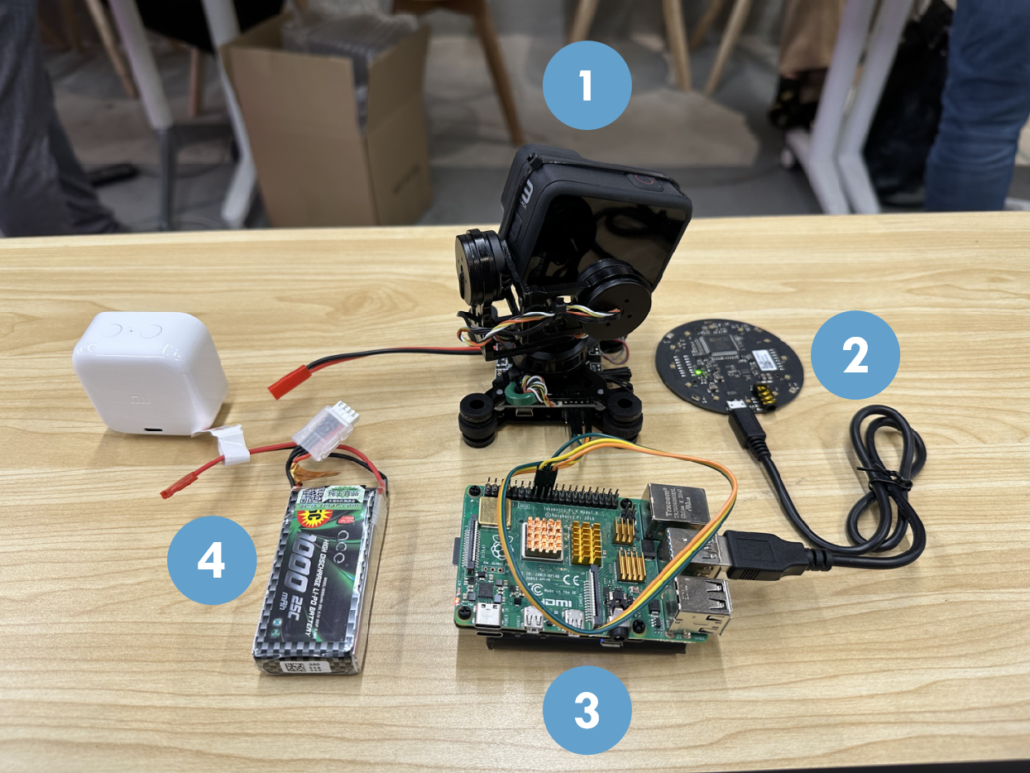
Keeping Pace with Dynamic Content: Raspberry Pi Audio Source Localization & Computer Vision for Advanced Camera Tracking

Notifications