Introducing Marvelmind Ultrasonic Indoor Navigation System(915/868MHz)
This week we bring you the new release of ready to use 3D (x, y, z) system for 399 USD: Marvelmind Indoor Navigation System Starter Set HW (915/868MHz) High precise(±2cm) indoor tracking system for robot and human positioning.
Marvelmind Indoor Navigation System is an off-the-shelf indoor navigation GPS for 2D/3D tracking. The system is based on stationary ultrasonic technology to get the location information from the mobile beacon. The station beacons are equipped to receive the ultrasonic signal from the mobile beacon.
The kit contains:
- 4 Stationary beacons with standard 50mm antennas
- 1 Mobile beacon without IMU
- 1 Modem supporting up to 250 beacons

Features
- High precise(±2cm) indoor tracking system for the use of autonomous robots, vehicles (AVG), and copters.
- Ultrasonic, oF(Time of Flight) and trilateration technology to measure the distance.
- Station beacon installed on the walls or ceilings and mobile beacon installed on the human body and robots.
- Beacons coverage radius up to 50 meters.
- 4 station beacons, 1 mobile beacon and 1 modem. The modem can support up to 250 beacons.
- It is also used to track other objects that the mobile beacon installed upon, for example, virtual reality (VR) systems, helmets for construction workers.
Basics of the system
Indoor Navigation System (“GPS”) (±2cm precision)
Marvelmind Indoor Navigation System provides high-precision indoor coordinates for autonomous vehicles and robots as the picture is shown below.
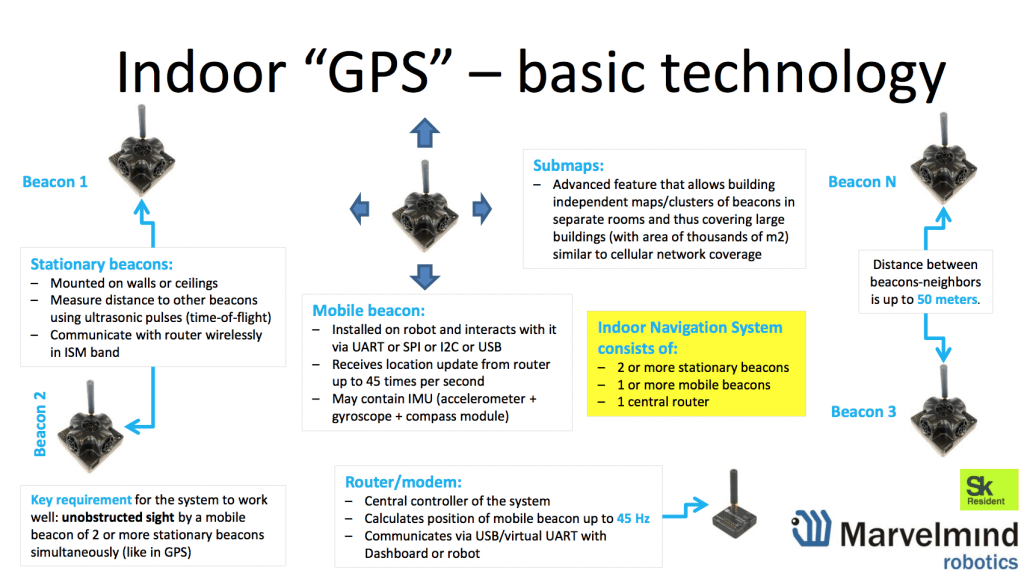
Key requirements for the proper system functionality:
- For 3D (X, Y, Z) tracking – An unobstructed sight by a mobile beacon of three or more stationary beacons simultaneously
- For 2D (X, Y) tracking – An unobstructed sight by a mobile beacon of two stationary or more stationary beacons simultaneously
- Distance to the nearest 2 or 3 beacons – not more than 30 meters (recommended). In ideal conditions – up to 50 meters
Demos
A fully autonomous small delivery robot moving in a simulated office/factory environment
- Mobile beacon is installed on the robot
- Stationary beacons are installed on the walls
- Blue dots – location of the robot (mobile beacon) measured by the Marvelmind Indoor Navigation System
- Yellow dots – location of the robot obtained from its own inertial/odometry system
- Big green dots – stationary beacons installed on the walls
Note, that robot and the Marvelmind Indoor Navigation System handles the shadows of ultrasonic signal from the beacons under the tables and chairs pretty well. This lets the robot to perform its tasks in the real-life environment pretty well.
The distances between stationary beacons can be up to 50 meters.
Robot driving fully autonomously using Marvelmind “GPS”
A fully autonomous robot is driving by its own relying on:
- Marvelmind Indoor “GPS”
- On-board odometry and inertial units
Robots receive coordinates for the key points to visit from the user (table on the right) and then create and follow the path by constantly correcting its position against the path. Coordinates are formed automatically in the Dashboard by simply clicking on the map.
The distance between beacons is up to 36 meters.
It is possible to cover with precise “GPS” the full campus by installing more beacons every 20-40 meters.
Downloads
- Marvelmind Indoor Navigation System Operating manual
- Placement Manual
- Autonomous copter setting manual
- PixHawk and Marvelmind Integration Manual
ROS support on Raspberry 2 and Raspberry 3:
Marvelmind ROS package – GitHub link.
Marvelmind ROS package v1.0.8 compatibility and main changes:
- Supports both millimeters and centimeters (obsolete) formats of data
- Supports hedgehog address in the data stream. Can receive positions of multiple hedgehogs from the modem
- Supports receiving positions of stationary beacons
- Supported ROS versions:
- Kinetic for Ubuntu 16.04
- Indigo for Ubuntu 14.04
- Hydro for Ubuntu 12.04
Please check the instructions on ROS integration.

